07 August 2023
渋滞長を予測する時空間AI「QTNN」を開発 ―東京都の1時間先の渋滞長予測で誤差40m以下を達成―
-
京都大学
-
科学技術振興機構(JST)
-
住友電工システムソリューション株式会社
概要
交通渋滞は、私たちに日々のストレスを与えるだけでなく、日本国内に年間約10兆円の損失をもたらし、さらには温室効果ガス排出量にも影響を及ぼす深刻な問題となっています。この問題を解決すべく、渋滞がいつ・どこで発生するかを予測するAIに世界中から注目が集まっています。京都大学大学院情報学研究科 竹内 孝 助教、鹿島 久嗣 教授、住友電工システムソリューション株式会社のグループは、これから起きる渋滞の場所と長さを予測する新たな時空間AI技術「QTNN」(Queueing-Theory-based Neural Network)を開発しました。
QTNN最大の特徴は、交通工学の知見に基づいて、混雑の変化と道路網の関係を学習する機能です。警視庁から提供されたデータを用いた、東京都内1098箇所の道路における「1時間先の渋滞長を予測する実験」で、QTNNは平均して誤差40m以下という高精度な予測を達成しました。この結果は、現時点で最先端とされる深層学習手法よりも予測誤差を12.6%も削減することに成功しています。今後は、実環境での本格的な運用に向けて、一部の道路において評価試験を実施し、本AI技術の信頼性の検証を進める予定です。
本成果は、アメリカ西部夏時間2023年8月6日にAI分野(機械学習とデータマイニング)の国際会議「The 29th ACM SIGKDD Conference on Knowledge Discovery and Data Mining」にて発表されます。
イラストデザイン:津田 祐果 (UMA / design farm)、イラストレーター:米村 知倫
1.背景
今後起きる交通渋滞を予測できれば、先回りした経路誘導や信号制御などにより交通の流れが円滑化され、渋滞発生の防止に繋がると社会からの期待が高まっています。交通渋滞は発生時間帯、発生場所、長さなどの変動が大きいことに加え、一度発生すると交通の状況が急激に変化するため、その有無や長さを正確に予測するAIの実現は困難な課題とされてきました。さらに、渋滞予測AIの実用化には渋滞予測の理由が明らかになるといったAIの解釈性と信頼性を構築する必要があります。そこで本研究では、長年のフィールド経験を踏まえた交通工学の知見と、近年注目を集める深層学習と交通ビッグデータを融合させることで、高精度かつ解釈性の高い新たな時空間AI技術「QTNN」の実現に取り組みました。
2.研究手法・成果
本研究で提案した新たな時空間AI技術であるQTNNは、交通工学の理論に基づき、ビッグデータを介して混雑の変化と道路網の関係を学習する機能を持ちます(図1)。QTNNは、まず多数の道路の混雑状況と道路網のデータから、深層学習によって交差点ごとの平均速度と交通量を予測します。次に交通工学で利用される交通流モデルを補正しつつ渋滞長を予測します。こうした2段階方式予測を行うことで、最先端の深層学習を使用しつつも交通工学の知見と合致する渋滞予測を実現しました。
この時空間AI技術は、警視庁から提供されたデータ(図2、3)を用いた、東京都の1098箇所の道路における「1時間先の渋滞長を2ヶ月間予測する実験」において、深刻な渋滞が発生する場合も、渋滞が発生しない場合も正確に予想することで平均して誤差40m以下という高精度な予測を達成しました(図4)。この結果は、現時点で最先端とされる深層学習手法よりも予測誤差を12.6%も削減することに成功しています。さらにQTNNは、交通量、平均速度、渋滞長の関係性を表す交通流モデルを用いるため、「6:00ごろから車両の流入台数が急激に増加して渋滞長が大きく伸びます」、「混雑がピークを迎えるため交通量と平均速度が低下します。しかし、周囲道路で一定の交通量が存在するため、この渋滞は10:00ごろまで継続します」といった予測結果の一部の解釈が可能となりました(図5)。
3.波及効果、今後の予定
QTNNは、警視庁が取り組むAIとビッグデータを活用した交通管制システムの高度化プロジェクトにおいて検討されており、今後は、実環境での本格的な運用に向けて、一部の道路において評価試験を実施し、本AI技術の信頼性の検証を進める予定です。さらには、信号制御、道路工事、事故発生などに関する情報を柔軟に活用して渋滞長を予測する、都市の基盤となる時空間AI技術の実現を目指しています。
4.研究プロジェクトについて
本研究の一部は、科学技術振興機構(JST) 戦略的創造研究推進事業 さきがけ「信頼されるAI領域(JPMJPR20C5)」の支援を受けたものです。また東京都の構造改革の取り組み「シン・トセイ」において、警視庁による「AIとビッグデータを活用した交通管制システムの高度化プロジェクト」(https://shintosei.metro.tokyo.lg.jp/leading-project/leading-project-08/)に関連する研究として実施されました。
<用語解説>
◉経路誘導:道路の交通状態に基づいて、現在地から目的地までの推奨ルートを渋滞などの混雑を迂回するように算出し、カーナビやスマートフォンの地図アプリで誘導を行います。
◉信号制御:道路上に設置した車両感知器で計測した交通状態に基づいて、信号機の青時間の配分や青/赤の切り替えタイミングを調整します。
◉渋滞予測AI:都市で蓄積された交通ビッグデータから渋滞を予測する技術です。世界中で研究開発が盛んですが、諸外国では主に平均速度と交通量が計測されるため、渋滞長予測に取り組んだ研究はほぼ存在しません。
◉AIの解釈性:AIによる判断理由を人間が理解できる度合い。AIがブラックボックスであると、内部でどのような演算が行なわれるか不明なため、AIの予測の理由が説明できず信頼性が低いことが問題視されています。
◉交通工学:土木工学の一分野で、道路交通全般に関係する研究が行われています。特に近年では高度道路交通システム(Intelligent Transport Systems)に関係する研究が注目を集めています。
◉深層学習:膨大なデータからパターンを学習する多層ニューラルネットワークの一種で昨今のAIブームをリードする技術ですが、内部の演算がブラックボックスである点が問題視されています。また、テキスト・画像・音声の解析とは異なり、交通データの解析精度は深層学習であっても未だに不十分とされています。
◉交通ビッグデータ:カーナビやスマートフォン、交通管制システムを通して蓄積される都市交通の膨大なデータを指しています。本研究では、東京都23区内の一般道1098箇所で5分おきに計測された1年分の平均速度、交通量、渋滞長を使用しました。ただし、道路セグメントの長さは平均値882m、中央値750mです。渋滞長は、一定の速度以下で停車と走行を繰り返す車列の長さを測る方法によって計測されました。
◉時空間AI技術:データがいつどこで計測されたかという情報を元に、ある現象が持つ時間・空間的に複雑な関係性(交通状況の時間的な変化と道路の接続関係による空間的な変化は相互に関係性を持つなど)を学習し、解析を行うために開発されたAIを指す用語として使用しています。
◉交通流モデル:交通状態を記述するための数理モデルです。一般に交通量、平均速度、密度の3つの変数の関係性が記述されます。しかし、管制システムでは密度が観測できないため、QTNNは、渋滞長を含めた関係式である砂時計モデルを使いました。
◉誤差:過去の交通データから、一定時刻先までの未来の渋滞長を予測した際に、予測値と実際の観測値の外れ度を二乗平均平方根誤差(Root Mean Squared Error)によって評価した値です。
<研究者のコメント>
世界中で巻き起こる苛烈なAI研究競争において、日本が得意とする精細なデータ計測技術とドメインへの綿密な知見は、最先端の時空間AI技術と掛け合わせることで世界に先駆ける大きなアドバンテージとなりえると考えます。本研究により、交通渋滞問題に対する新たな解決策が構想され、都市の持続可能性に大きく貢献することを期待します。我々は、今後も信頼性と安全性の高いAI技術の可能性を追求し続けます。
<論文タイトルと著者>
| タイトル | QTNet: Theory-based Queue Length Prediction for Urban Traffic(QTNet: 待ち行列理論に基づく都市交通予測) |
| 著 者 | Ryu Shirakami, Toshiya Kitahara, Koh Takeuchi, Hisashi Kashima |
| 掲 載 誌 | Proceedings of the 29th ACM SIGKDD Conference on Knowledge Discovery and Data Mining (KDD '23). |
| DOI | 10.1145/3580305.3599890 |
<参考図表>
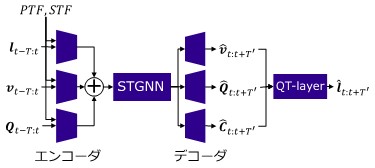
図1. QTNNの模式図。過去から現在までの渋滞長、平均速度、交通量から、深層学習(STGNN)を用いて今後の平均速度と交通量を予測する。これらの予測値を元に交通流モデルを補正しつつ(QT-layer)、
今後の渋滞長を予測する。
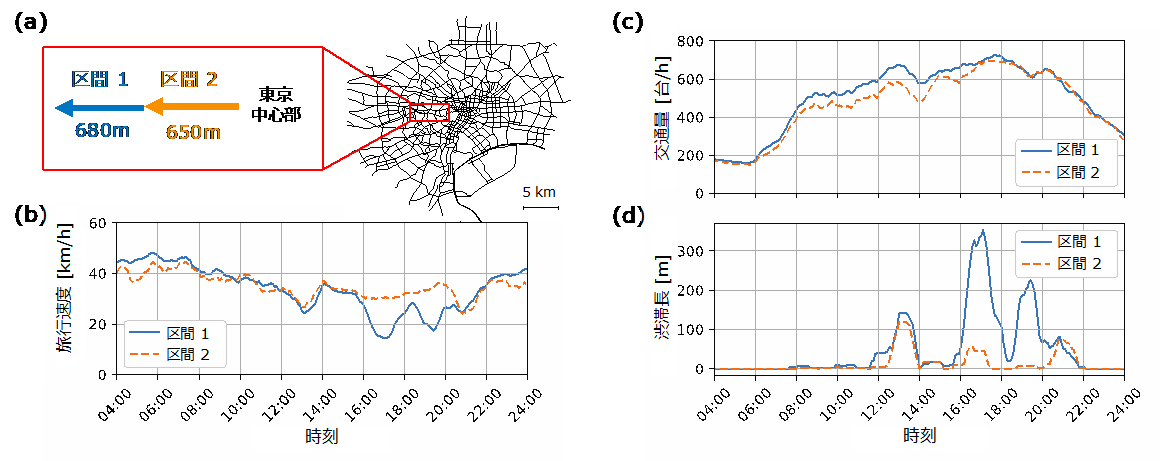
図2. (a) 東京都内の道路網の例、(b、c、d) 実験で使用した2つの道路での状況推移の例。
下流の区間1で渋滞が起きると、遅れて区間2で渋滞が発生する過程が確認できる。
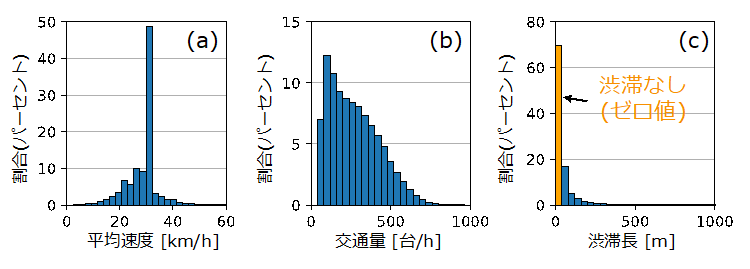
図3. データのヒストグラム(a) 平均速度、(b) 交通量、(c) 渋滞長。
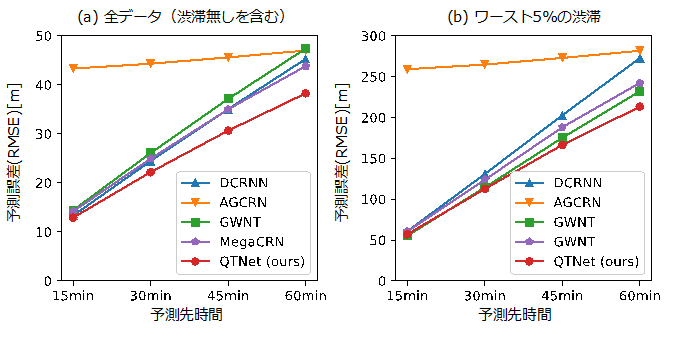
図4. 15分から60分先までの予測の平均誤差を(a) 全データで評価した結果、(b) 全データのうち最も深刻な渋滞5%のデータで評価した結果。QTNNは、他の最新のAI(DCRNN、AGCRN、GWNT、MegaCRN)よりも全ての場合で低い誤差を達成した。
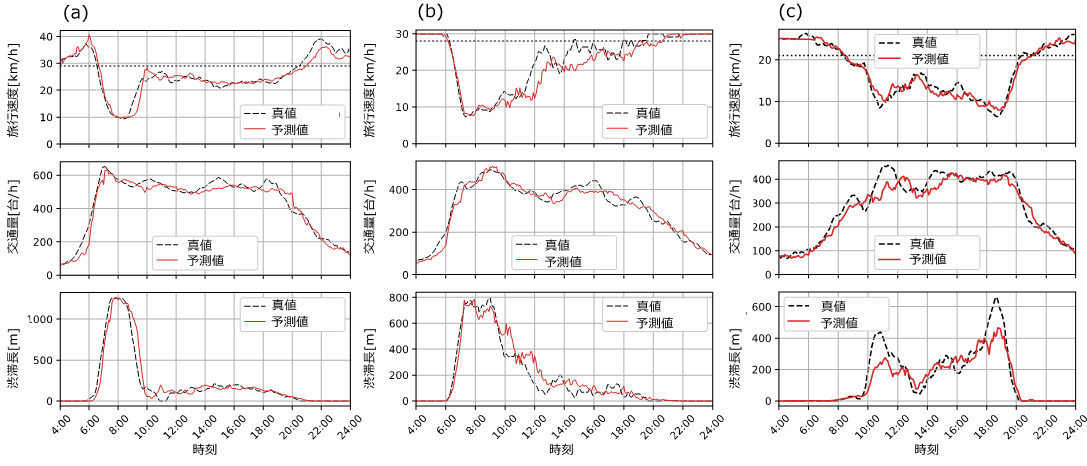
図5. 3つの異なる道路(a)、(b)、(c)において、提案手法によって得られた平均速度、交通量、渋滞長の予測結果(赤)と実際の観測値(点線)。提案手法の予測は、おおむね観測値と近い値と確認できる。